Teleoperation
Teleoperation allows you to control TurtleBot manually. There are different ways: keyboard, joystick, QT teleop, interactive markers. Our tutorial will cover keyboard and interactive markers method.
In this lesson we will show the tricks in terminal:
- Using Up and Down Arrow keys you can switch between the last-used commands.
- Use
Ctrl+Rcombination to invokereverse-i-search. Type letters,gazfor instance, and you will get a match for the recent command in your history which hasgaz. You can pressCtrl+Ragain to go to the previous command in this search. When you see the proper command pressEnterto execute it or Right Arrow to choose this command for editing.
We show using these tricks in tutorial videos for this lesson with explanations. Later we will assume that you understand how it works.
Keyboard
While Gazebo and Rviz are running, open a new terminal and run:
roslaunch turtlebot_teleop keyboard_teleop.launchNOTE: The terminal with teleop launching has to be active all the time otherwise you will not be able to operate the TurtleBot.
TurtleBot can move forward and backward, rotate. Also you can increase/decrease the speed. See the instructions in the terminal output:
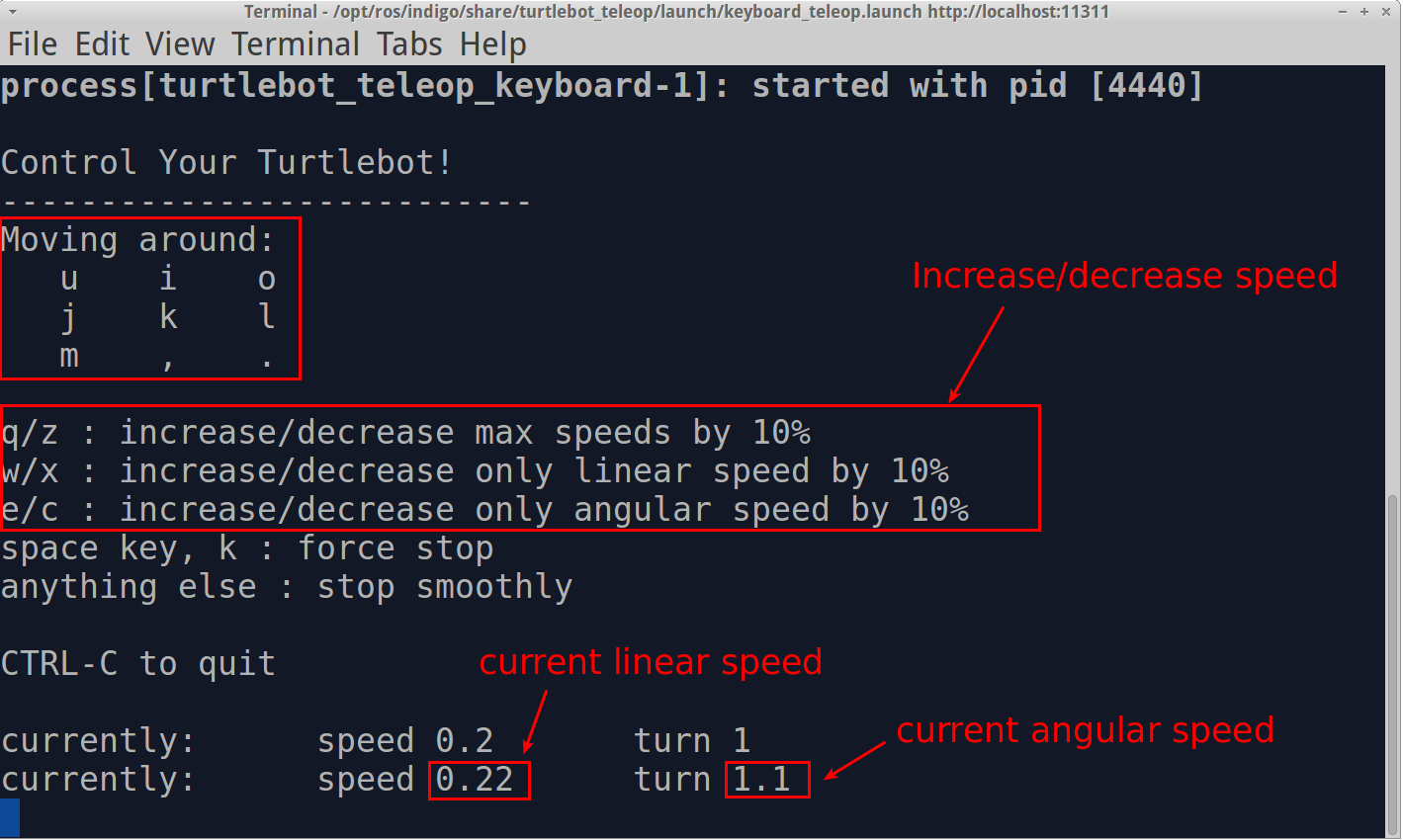
Control Keys
You can watch how it works in this video:
Teleoperation Keyboard
Interactive Markers
You can control TurtleBot in Rviz. Check that you have the interactive markers packages installed:
sudo apt-get install ros-indigo-turtlebot-interactive-markersWhile Gazebo and Rviz are running, open a new terminal and run:
roslaunch turtlebot_interactive_markers interactive_markers.launchFollow the steps below to see the robot’s movements:
- Enable
Interactive Markersoption from left-bar. - Select the
Interacttool in the tool panel on the top of the screen. You will see blue ring and red arrows. - Drag the red arrows to drive the TurtleBot forward and backward.
- Drag the blue ring to rotate the TurtleBot.
- You can drag the blue ring to rotate and drive simultaneously.
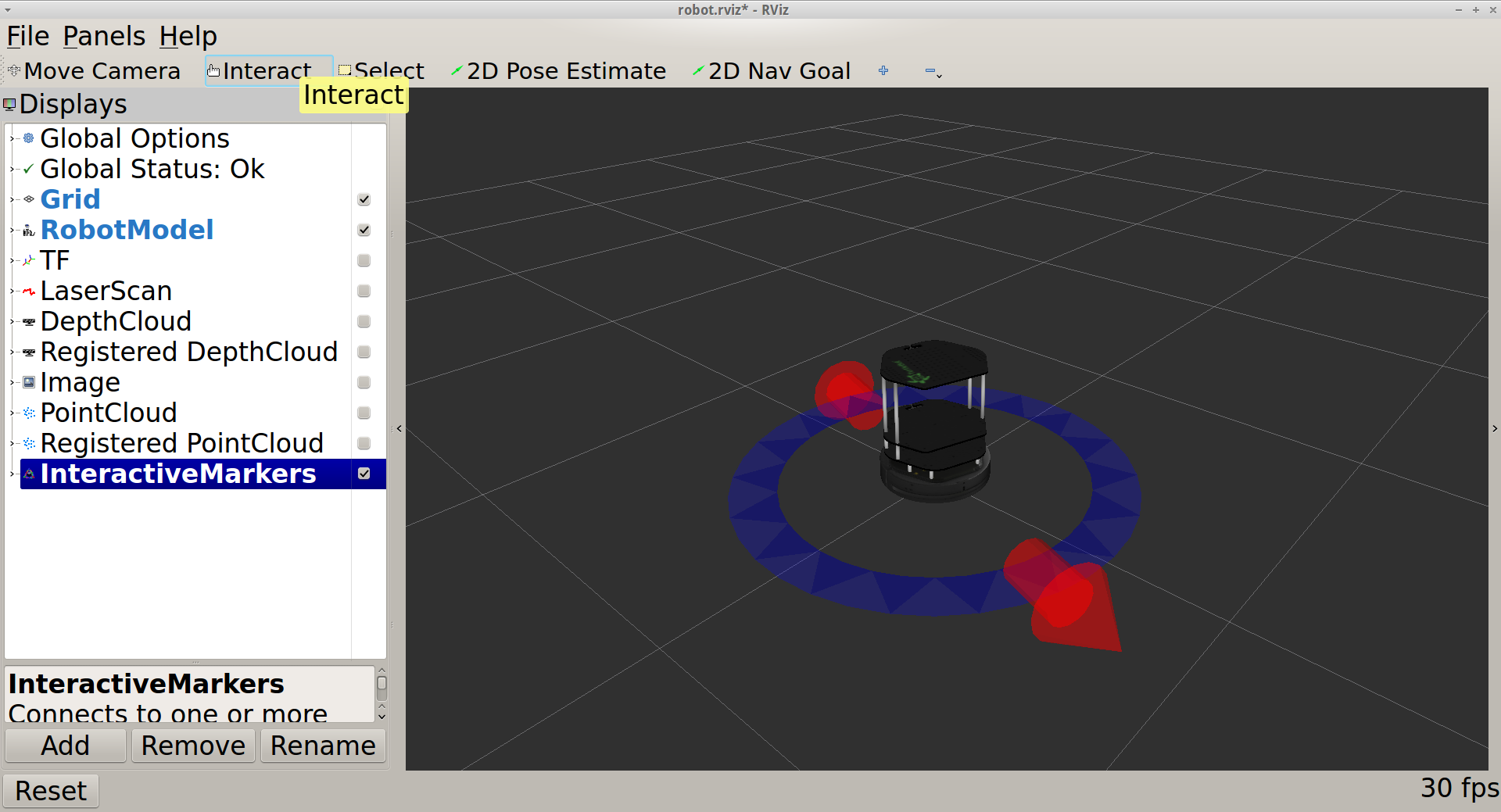
Control Markers
You can watch how it works in this video:
Teleoperation Interactive Markers