Software Installation
This tutorial assumes you are running Ubuntu 14.04. If you want to install Ubuntu on your machine, follow this tutorial.
NOTE: If you use virtual machine it will cause problems.
To create a TurtleBot simulation you will need to install ROS Indigo and TurtleBot packages following this tutorial.
NOTE: You should use the LTS versions of these software as we wrote before. Both Ubuntu 14.04 and ROS Indigo are LTS.
You can check which version of Linux you have by running:
lsb_release -aYou have the right version if you see:
Description: Ubuntu 14.04.* LTS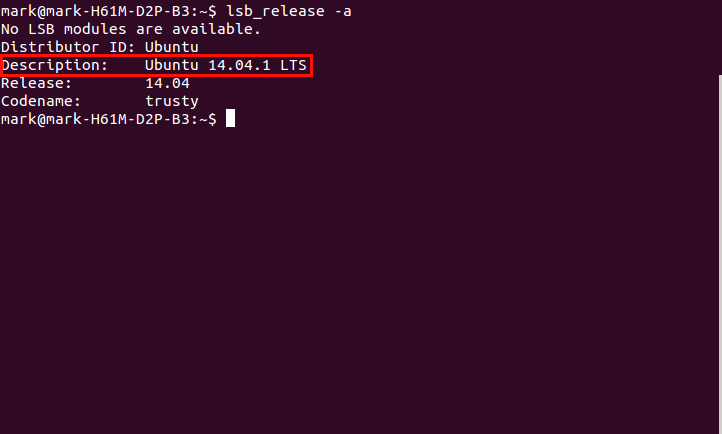
Result of “lsb_release -a” in Terminal
You have to set up the ROS environment variables before executing any ROS command. You have to run in every new terminal:
source /opt/ros/indigo/setup.bashBut, you can pre-configure your terminal with ROS environment variables and do not think about it:
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrcNOTE: If you want to edit or remove this configuration from your terminal’s
environment you will need to edit ~/.bashrc and make the updates there.
Adding settings to the ~/.bashrc will affect only new terminals. So you will
need to reopen the terminals.
NOTE: We use the pre-configured terminal in all lessons, so do not forget to write the proper command if you prefer the first case.
You can check which distribution of ROS you have by running:
roscoreYou have the right distribution if you see:
* /rosdistro: indigo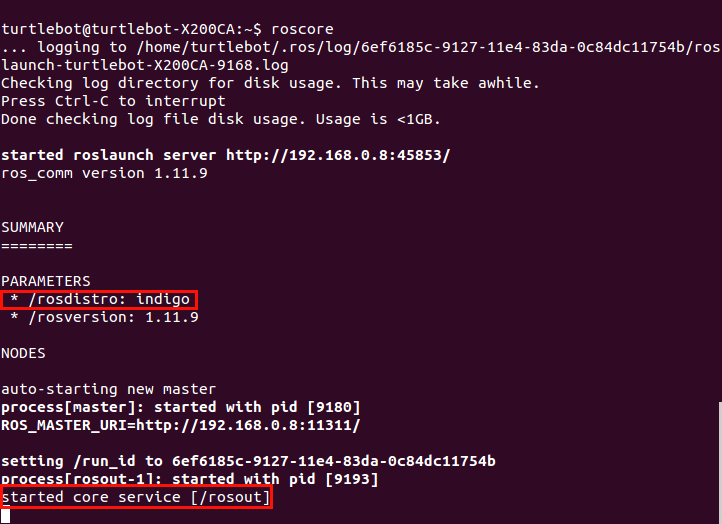
Result of “roscore” in Terminal
ROS is installed correctly if you see:
started core service [/rosout]If there are any troubles, try to reinstall the software step by step using the tutorials. In addition, you can ask your questions or find a solution for similar problem on this site.