TurtleBot Follower
In this lesson we will launch TurtleBot follower demo. We will launch two TurtleBots in Gazebo Concert, then you will drive the first TurtleBot and the second will follow it.
Prerequisites
1. This lesson is a continuation of the previous lesson:
“Multiple TurtleBots in Concert”.
If you have not done instructions from prerequisites section, you should do
them firstly.
2. We will use tutlebot_follower package.
2.1 Change directory.
cd ~/my_ws/src2.2 Clone the turtlebot_apps repository.
git clone https://github.com/nampi/turtlebot_apps.gitNOTE: We will use this repository until this pull request will be merged.
The original repository is https://github.com/turtlebot/turtlebot_apps.
2.3 Change directory.
cd turtlebot_apps2.4 Change git branch.
git checkout simulThe opportunity to launch follower application in simulation was added in
simul branch.
3. Build package.
source /opt/ros/indigo/setup.bash
cd ~/my_ws/
catkin_makeIf you have an error then use CATKIN_IGNORE for all packages except
turtlebot_follower package.
touch /home/<your_name>/my_ws/src/turtlebot_apps/software/pano/pano_core/CATKIN_IGNORE
touch /home/<your_name>/my_ws/src/turtlebot_apps/software/pano/pano_ros/CATKIN_IGNORE
touch /home/<your_name>/my_ws/src/turtlebot_apps/software/pano/pano_py/CATKIN_IGNOREIf you run catkin_make, it will ignore any package in the directory with
CATKIN_IGNORE file.
Launching Turtlebot Follower
TurtleBot named gamza1 will be controlled using joystick, TurtleBot named
gamza2 will follow gamza1 in this example.
1. Launch Gazebo Concert (steps 1-10 from the previous lesson).
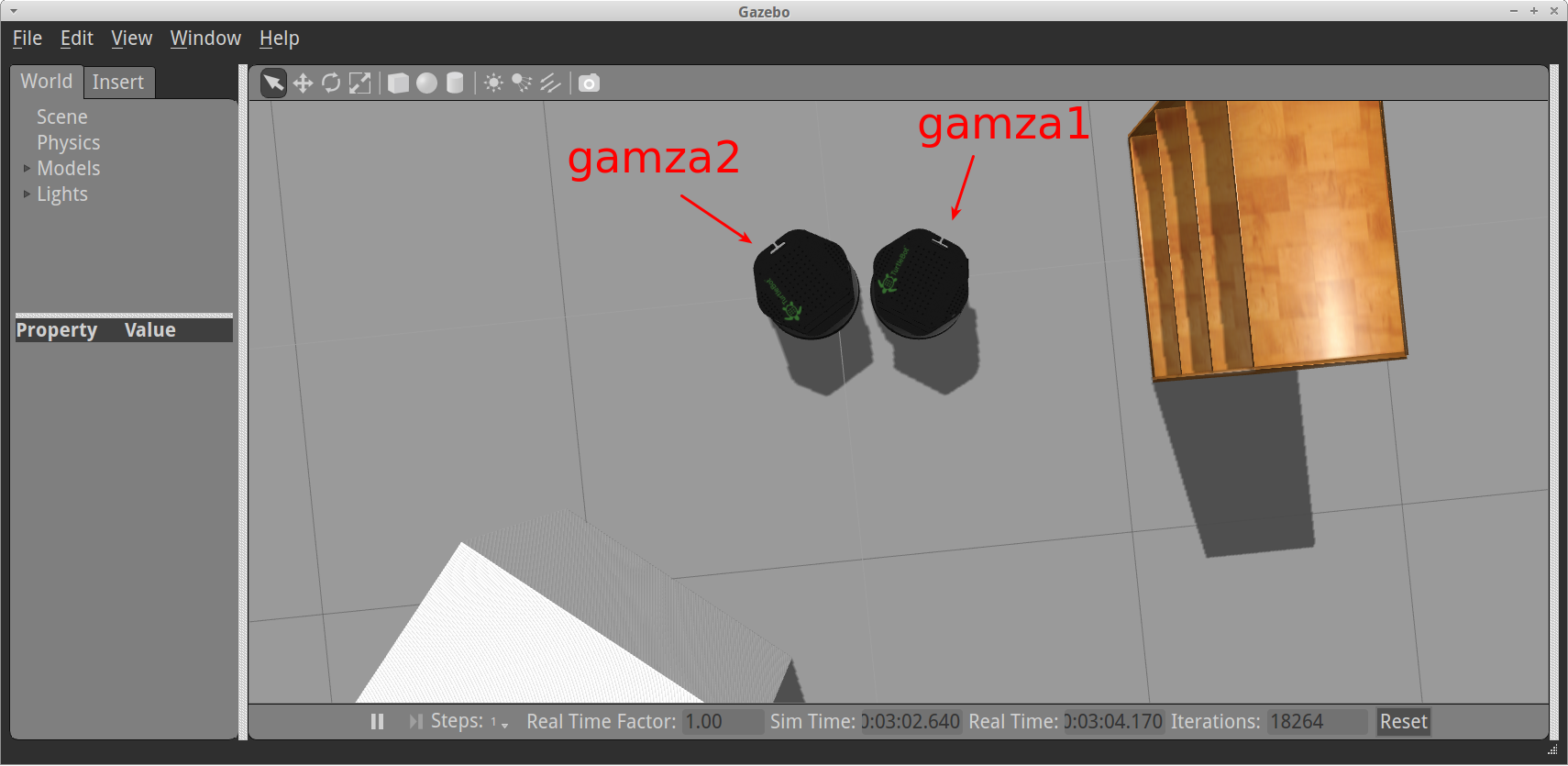
Gazebo Concert
2. Select gamza1 in the resource list and capture it.
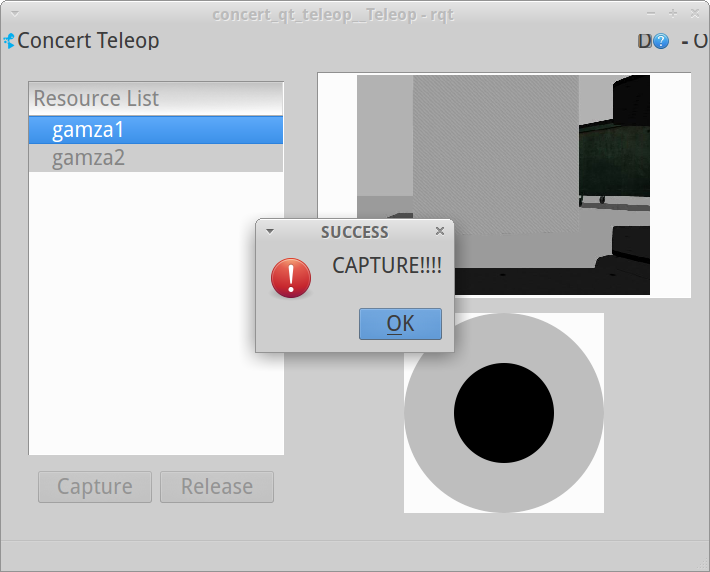
Capture gamza1
3. Open a new terminal and change the path.
source ~/my_ws/devel/setup.bash4. Launch turtlebot_follower demo.
roslaunch turtlebot_follower follower.launch simulation:=true __ns:=gamza2NOTE: __ns is a substitute for ROS_NAMESPACE. You can find more information on wiki ros.
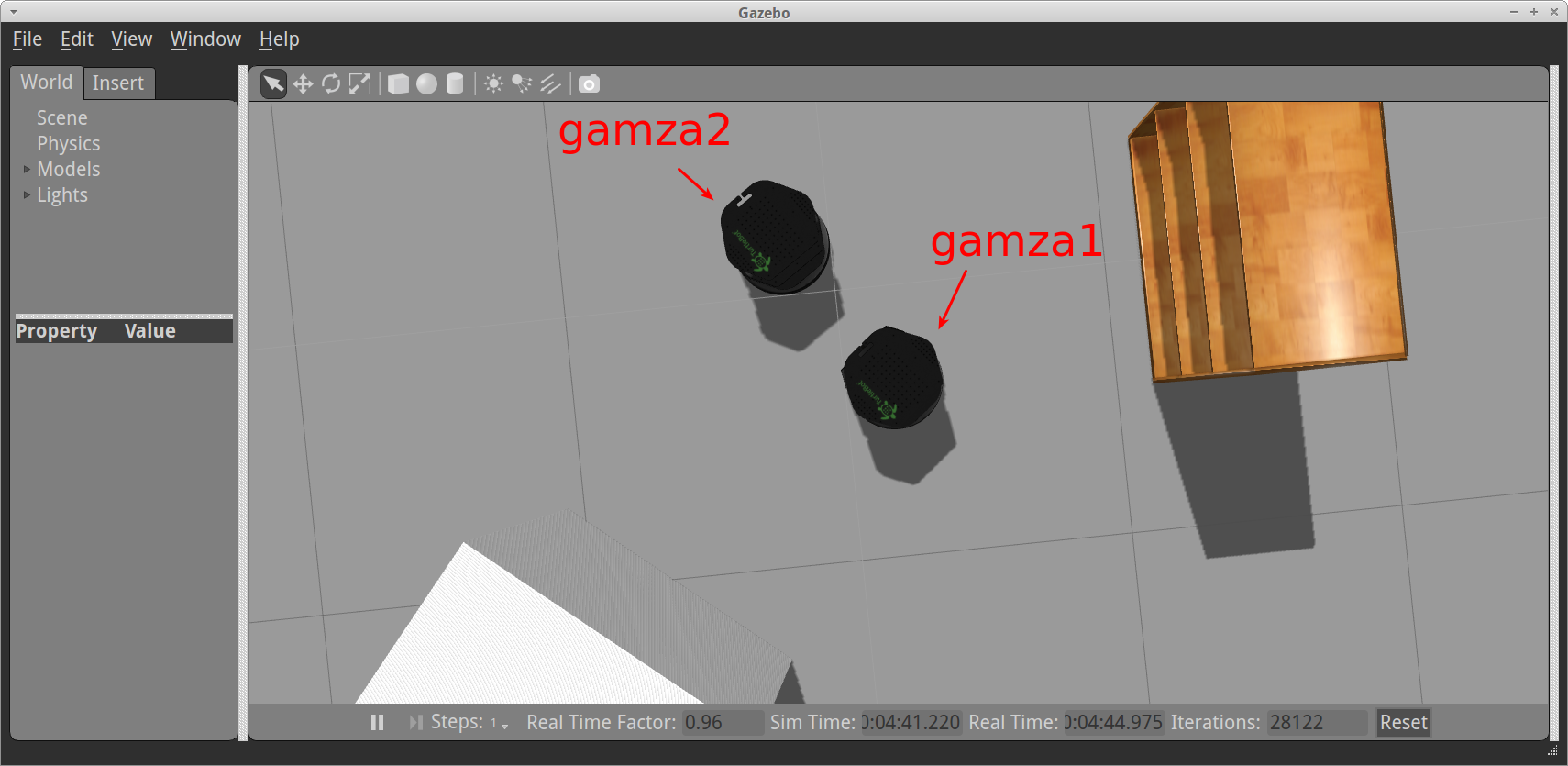
5. To initiate following, gamza1 has to be in front of gamza2. Drive
gamza1 using joystick to place it in front of gamza2. After gamza2
recognizes gamza1, gamza2 tries to keep the center of the observed object
directly in front of itself and a fixed distance away.
TurtleBot Follower
If gamza1 is very close to gamza2, then gamza2 will go backward away. If
distance between them is increasing then gamza2 will go forward after gamza1
to reduce the distance.
You should move gamza1 slowly. If you move gamza1 too quickly, then gamza2
will lose it and stop.
NOTE: Other objects could confuse the follower. You should avoid them.
6. Interrupt the processes. Close the windows.
You can watch these steps in the video:
TurtleBot Follower
You can find more information about turtlebot_follower package on wiki ros.